开发环境:
开发系统:Ubuntu 20.04
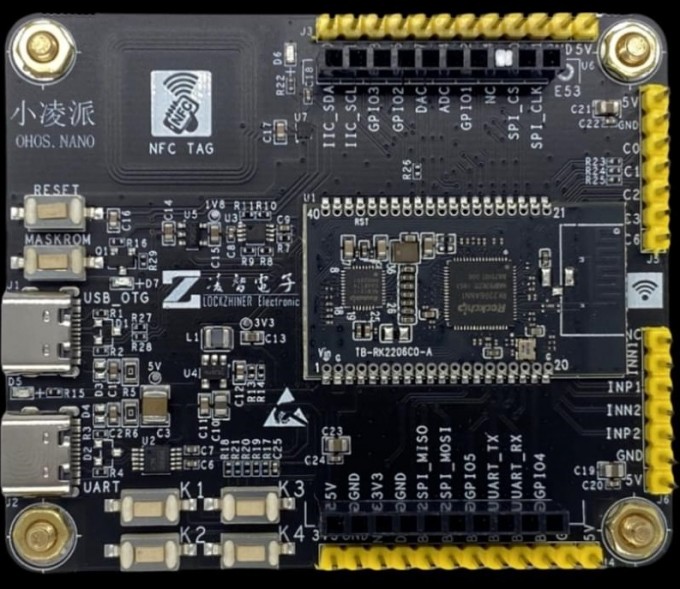
开发板:小凌派-RK2206开发板
OpenHarmony版本:3.0.0-LTS
小凌派-RK2206是一款由福州市凌睿智捷电子有限公司专为HarmonyOS系统打造的HarmonyOS开发板。
采用IoTCluB的E53接口标准,可接入所有的E53案例扩展板。
主控为瑞芯微RK2206芯片,200MHz主频,RAM 256KB、ROM 16KB、PSRAM 8M、FLASH 8M。
板载NFC Forum Type 2 Tag芯片及天线,可实现HarmonyOS“碰一碰”功能。
支持 IEEE 802.11b/g/n 制式,AP 模式。
USB 2.0 、SD card /SPI/I2C 接口、麦克风接口、E53 接口(包含 UART、 I2C、ADC、DAC、PWM、5 个 GPIO)。
一根TypeC USB线,即可实现供电、下载等功能。
一根TypeC USB线,可支持串口调试功能。
本文将介绍如何搭建OpenHarmony开发环境,OpenHarmony主要在Linux平台上开发,因此需要使用Linux环境开发,要想使用Linux开发环境,可以选择安装Linux系统,也可在Windows上安装虚拟机,笔者就是使用的该方式,这种方式的好处是可以随时拷贝,非常方便。
笔者的虚拟机使用的是VMware Workstation,Linux系统使用的是Ubuntu 20.04,关于VMware Workstation的安装和Ubuntu的安装笔者这里就不在赘述了,笔者默认大家已经装好VMware Workstation和Ubuntu。
1.1安装依赖包
更新主机的源列表:
$ sudo apt-get update安装依赖包:
$ sudo apt-get install build-essential gcc g++ make zlib* libffi-dev e2fsprogs pkg-config flex bison perl bc openssl libssl-dev libelf-dev libc6-dev-amd64 binutils binutils-dev libdwarf-dev u-boot-tools mtd-utils cpio device-tree-compiler git git-lfs curl python3-pip tree值得注意的是,如果Ubuntu Shell环境如果不是bash,则需要修改为bash。检测命令如下:
$ ls -l /bin/sh
打开终端工具,执行如下命令:
$ sudo dpkg-reconfigure dash然后选择No,即可将Ubuntu shell由dash修改为bash。
1.2获取源码
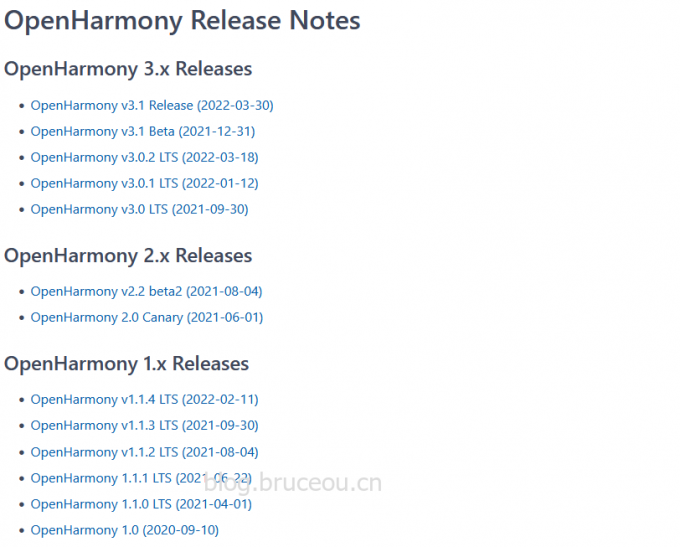
OpenHarmony的最新版本是3.1(2022-03-30),关于OpenHarmony的所有版本的更新信息请参看Release Notes。
1.检查Python环境
首先检查下Python版本。

可以看到,Ubuntu 20.04默认的Python版本是3.8.10。因此,无需升级Python。
值得注意的是,如果无法使用python命令,可做一个软链接,命令如下:
$sudo ln -s /usr/bin/python3.8 /usr/bin/python2.配置Git
配置Git用户信息:
$git config --global user.name "yourname"
$git config --global user.email "your-email-address"如果想使用ssh下载源码,还需要配置ssh。
关于如何配置gitee的SSH公钥,请参看gitee的帮助中心。
3.获取OpenHarmony源码
$ mkdir rk2206
$ cd rk2206接下来获取源码rk2206的OpenHarmony源码,这里通过https下载。
$ git clone https://gitee.com/Lockzhiner-Electronics/lockzhiner-rk2206-openharmony3.0lts.git

1.3安装hb工具
hb是HarmonyOS2.0里新增加的编译构建命令行工具。需要Python 3.7.4及以上版本的支持,建议安装3.8.x。Ubuntu 20.04默认安装的是Python 3.8.10。
在源码根目录下执行:
$ cd ~/rk2206/lockzhiner-rk2206-openharmony3.0lts
$python3 -m pip install --user build/lite然后设置环境变量
$ vim ~/.bashrc将以下命令拷贝到.bashrc文件的最后一行,保存并退出。
export PATH=~/.local/bin:$PATH执行如下命令更新环境变量。
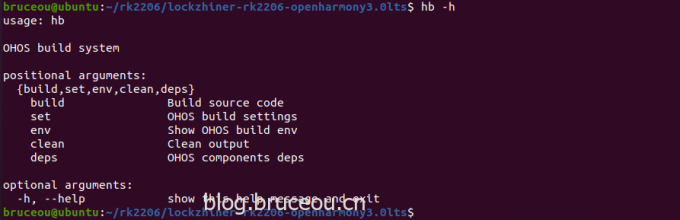
$ source ~/.bashrc执行hb -h有相关帮助信息,有打印信息即表示安装成功:
卸载方法:
$ python3 -m pip uninstall ohos-build值得注意的是,不要用python3 -m pip install –user ohos-build,这样安装的工具和源码不匹配,安装会有问题,请使用功能笔者给出的安装方法。
1.4安装Python工具
1.安装Scons
运行如下命令,安装SCons安装包。
$ python3 -m pip install scons运行如下命令,查看是否安装成功。如果安装成功,查询结果下图所示。
$ scons -v
版本要求3.0.4以上。
2.安装python工具模块
运行如下命令,安装python模块setuptools。
$ pip3 install setuptools3.安装Kconfiglib
安装GUI menuconfig工具(Kconfiglib),建议安装Kconfiglib 13.2.0+版本,命令如下:
$ pip3 install kconfiglib4.安装Python签名依赖的组件包
安装升级文件签名依赖的Python组件包,包括:pycryptodome、six、ecdsa。安装ecdsa依赖six,请先安装six,再安装ecdsa。
命令如下:
$ pip3 install pycryptodome
$ pip3 install six --upgrade --ignore-installed six
$ pip3 install ecdsa1.5安装交叉编译工具链
编译代码需要编译器,Linux系统的编译器是GCC,GCC编译的程序只能在X86上运行,不能运行在嵌入式的硬件平台,因为嵌入式平台大都是ARM体系结构,因此这就需要一个在Linux环境下能使用GNU编译ARM体系结构的编译工具,这也就是交叉编译工具。
所谓交叉编译工具就是在一种平台上编译出能运行在体系结构不同的另一种平台上的程序,比如在PC平台(X86 CPU)上编译出能运行在以ARM为内核的CPU平台上的程序,编译得到的程序在X86 CPU平台上是不能运行的,必须放到ARM CPU平台上才能运行。
做过嵌入式开发的朋友都知道,在嵌入式开发过程中有宿主机和目标机的角色之分:宿主机是执行编译、链接嵌入式软件的计算机;目标机是运行嵌入式软件的硬件平台。
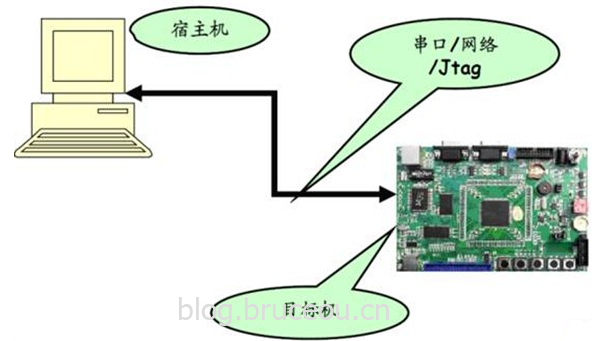
嵌入式开发流程大致就是在宿主机完成目标的开发工具,使用功能交叉编译工具生成固件,将固件烧写到目标机,在开发初期,还需要在线调试等工作,这就需要诸如J-link等调试工具。
RK2206属于ARM体系结构,在Linux环境下开发也需要借助交叉编译工具。
gcc-arm-none-eabi就是一个基于ARM的交叉编译工具链,而且还是开源的,适用于Arm Cortex-M和Coretex-A系列处理器,包括GNU编译器(GCC),以及GDB,不仅适用于Linux,还适用于Windows,MacOS上的交叉编译。
好了,直接看下载地址吧。
值得注意的是,以前的版本分为GUN-RM和GUN-A,最新的不区分,我们这里不要下载最新的,笔者下载的是10.3-2021.07版本。
接下来就是开始安装配置交叉编译工具链。
1.拷贝gcc-arm-none-eabi-10.3-2021.07-x86_64-linux.tar.bz2到虚拟机中的/opt/目录下。
2.解压gcc-arm-none-eabi-10.3-2021.07-x86_64-linux.tar.bz2,用tar命令。
$sudo tar -xvf gcc-arm-none-eabi-10.3-2021.07-x86_64-linux.tar.bz2 //必须用超级用户模式3.编辑~/.bashrc文件。
#vi ~/.bashrc在文件最后增加一行
export PATH=$PATH:/opt/gcc-arm-none-eabi-10.3-2021.07/bin保存退出
4.运行 source ~/.bashrc 让文件生效
5.检查
方法一:
在命令行下输入 arm-n然后按tab键看会不会自动补全
方法二:
输入:arm-none-eabi-gcc -v
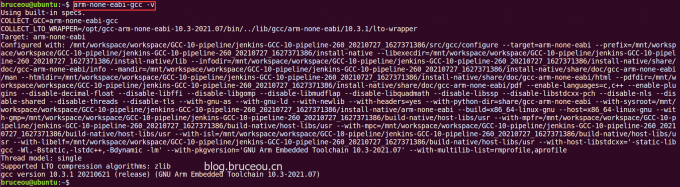
表示配置成功!
当然啦,如果嫌麻烦,可以使用官方的开发环境:
下载网址(百度云):https://pan.baidu.com/s/1IfT0onLb1kcoByhOUU-kyA 提取码:eikl
Ubuntu系统镜像是Ubuntu 20.04.3 LTS 64位系统版本,已安装相对应的编译环境。其中,账号主要有2个:
1.lzdz
账号:lzdz密码:123456
2.root
账号:root密码:123456
欢迎访问我的网站
BruceOu的哔哩哔哩
BruceOu的主页
BruceOu的博客
BruceOu的CSDN博客
BruceOu的简书
BruceOu的知乎
欢迎订阅我的微信公众号
关注公众号[嵌入式实验楼]获取更多资讯